

Robot Evolution: Hands-Off Engineering Approach Will Allow Robots To Evolve Like Humans
One robot gallops and rocks toward a finish line like a horse that has had its front and back legs fused to each other. Another robot inches along like a living accordion. Others look like slightly exploded Rubik’s Cubes limping along:
These creatures are a far cry from the sleek metal automatons of science fiction. But they could be part of a new design paradigm -- one where the robot is the end product of thousands of years of evolution, compressed into the blink of an eye by a computer.
Humans have gotten pretty good at making robots that can repeat a certain task over and over again. But trying to imitate life is difficult -- environments that seem relatively simple to us are complicated for a robot encountering them for the first time. Witness the Honda robot Asimo’s attempt to climb a flight of stairs:
Roboticists want to make robots that are more adaptable. To that end, scientists from Cornell University’s Creative Machines laboratory are taking a radical approach to robot design -- a hands-off approach based on a digital simulation of evolution. After all, tigers or elephants aren’t made by engineers sitting around trying to design legs and tails and eyes -- they’re shaped by the environment they live in, as well as time. Why not try the same thing in creating artificial life?
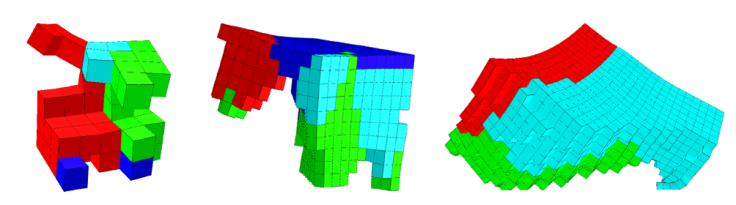
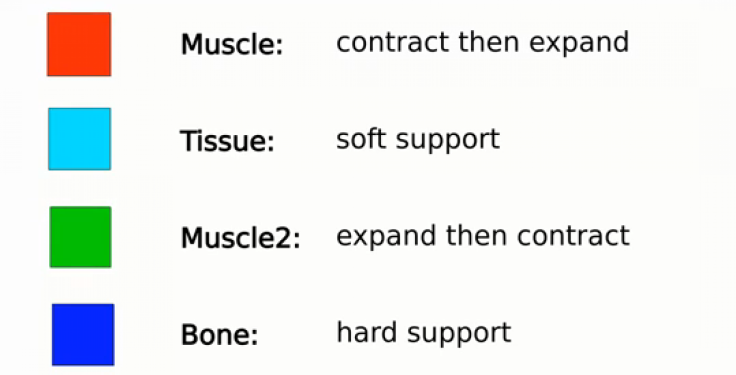
In nature, embryonic development starts with a mass of unspecialized cells. Different kinds of tissue form thanks to chemical gradients that spread across that unmolded cellular “clay.” Cornell’s robots are built along the same model -- except, instead of a mass of cells, the starting material is a cube subdivided into blocks (the number of blocks can vary from hundreds to thousands or more). Then, mathematical functions take the place of chemical gradients. A computer algorithm generates basic robots with random arrangements of four materials -- two kinds of “muscle,” soft supporting “tissue” and harder supporting “bone” material:
Evolution comes into play when the robots are put to a simple test: Move as far as you can, as fast as you can. The most successful robots get to reproduce more -- either "asexually" by making copies of themselves with slight variation or "sexually" by combining traits with other winning designs. Each new generation has slight differences that start to add up over time, resulting in a strange and wonderful variety of forms.
“There was no engineering on my part, saying ‘this is how you should walk, this is how you should look, this is how you should behave,’” researcher Nick Cheney said at an “Inside Cornell” talk in New York City on Tuesday.
The robots haven’t been actually built yet, but Cheney and his colleagues are interested in the possibilities afforded by 3-D printing. The robots could be made of different types of silicone or plastic and animated by electric currents or even air pumps. Even though they’re virtual designs right now, Cheney still considers them worthy of the title "robot."
"What makes these things ‘robots’ is that they’re embodied -- they’re not some piece of software. They can interact with their environment,” Cheney said.
In this case, the environment is something called a physics engine -- a computer program that simulates physical forces, which can be found in just about any modern video game.
At the moment, the evolutionary aspect of the algorithm is pretty simple -- the robots don’t have to do anything other than move. But with advances in computing power, Cheney and his colleagues hope to make the model increasingly complex, perhaps even letting robots interact, to see how aggressive or cooperative traits develop.
Will runaway digital evolution lead to a robot revolution? It’s not very likely right now -- the squishy, odd robots running around in the computers at Cornell are totally brainless. But even when intelligence is grafted onto these artificially evolved creatures, Cheney thinks we can all just get along.
“The things that computers are good at and the things that people are good at are different,” Cheney said. In the future, he sees robots and humans “collaborating, not competing.”
Cheney will be presenting his work at the Genetic and Evolutionary Computation Conference in Europe later this summer. Meanwhile, here’s a video produced by the Cornell team that shows some of the squishy robots in action:
© Copyright IBTimes 2024. All rights reserved.
-

IMF Says Global Debt Levels Face 'Great Election Year' Risk
-

Divisions Among Colombia's FARC Dissidents Complicate Peace Talks
-

French Far Right Gets Youthful Vibe With 28-year-old Leader
-

US Fed's Powell Says Inflation Fight May Take 'Longer Than Expected'
-

Mideast-related Oil Price Spike Threatens 'Relatively Good' Economic Outlook: IMF Chief Economist
-

Wine Growers 'On Tip Of Africa' Race To Adapt To Climate Change
-

Despite Olympic Truce, Games Wrestle With Political Fallout
-

What Will The Fed Do With The Latest Inflation Numbers?
-

US Retail Sales Up More Than Expected In March
-

Alexandre De Moraes: Brazil Judge In Feud With Elon Musk









