

Robotic Legs To Make Amputees? Steps Natural
Researchers at the University of Arizona claim to have invented a pair of robotic legs that mimic the human gait better than any other artificial leg.
Findings of the research, conducted by M Anthony Lewis, Director, Arizona's Robotics and Neural Systems Laboratory, and Theresa Klein, Ph.D. student with the lab, were published in the Journal of Neural Engineering July 6 detailing how they were able to accomplish this feat.
Interestingly, we were able to produce a walking gait, without balance, which mimicked human walking with only a simple half-centre controlling the hips and a set of reflex responses controlling the lower limb, Theresa Klein said in a TechMediaNetwork report published in Fox News.
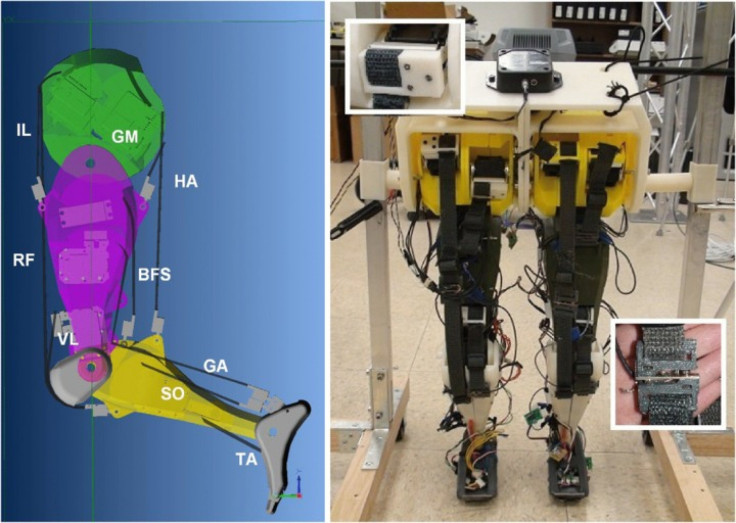
Inspired by nature, the researchers designed the robotic legs to imitate musculoskeletal architecture and sensory feedback pathways to make them move exactly the way humans do. A report published in the PCWorld cites how the robotic legs employ an artificial form of Central Pattern Generator (CPG) to facilitate the movement.
The CPG is a neural network in the spine that helps individuals walk in perfect rhythm. The robotic legs possess an array of sensors that help them walk with ease.
The robot has helped the scientists better understand the human gait. It has helped them arrive at the conclusion that a simple CPG is even found in babies before they learn to walk. This CPG on maturing permits complex movements.
Previous attempts to construct walking robots never included the nervous system feedback and biological reflexes available to humans. It is widely believed that the new robots can also improve the features of the humanoid robots that the U.S. military seeks to deploy on the battlefields or that rescue workers may want to deploy in disaster zones. In addition, it may enable patients with serious spinal cord injury to walk again through proper stimulation in months following the injury.
© Copyright IBTimes 2024. All rights reserved.
-

Microsoft Expands Its AI Empire Abroad
-

Oil: 'Mother Of Corruption' In Venezuela
-

'Extreme' Climate Blamed For World's Worst Wine Harvest In 62 Years
-

Macron Warns 'Mortal' Europe Needs Credible Defence
-

Bitcoin And Crypto Price Review - Another Myth Gets Busted?
-

Mass Cancellations Loom Despite French Air Union Cancelling Strike
-

Mired In Crisis, Boeing Reports Another Loss
-

Recycled 'Zombie' Misinformation Targets US Voters
-

Hackers Leak Part Of Source Code Of El Salvador's Bitcoin Wallet
-

Azerbaijan Says 'Closer Than Ever' To Armenia Peace Deal Amid Border Talks









