

The Cute Little DARwIn-OP Robot Gets A Virtual Twin To Learn From [VIDEO]

Dynamic Anthropomorphic Robot with Intelligence - Open Platform, or the little humanoid robot known as DARwIn-OP has a digital twin that will let the robot learn new tasks and ability. DARwIn-OP’s twin is a computer simulation that mimics the mechanics of its real-life counterpart allowing for an extremely fast, and safe, testing center.
The virtual DARwIn-OP was created by David Mansolino, a graduate student from the École polytechnique fédérale de Lausanne (EPFL), located in Switzerland. Using Cyberbotics, a mobile robot simulation software company, Mansolino created a digital replica of the robot. The simulation allows researchers to test new functions or abilities without worrying about damaging DAWwIn-OP.
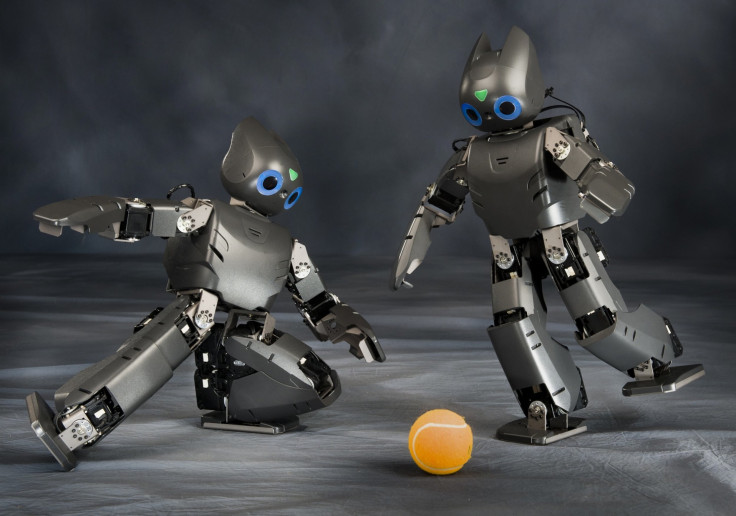
According to EPFL, the robot is equipped with a camera, a gyroscope, an accelerometer and 20 motors allowing DARwIn-OP a wide range of motion. The robot can track a ball as an individual moves it, can fall and get back up, kick a ball and wave goodbye.
Mansolino’s simulation lets researchers test a range of scenarios, from DARwIn-OP interacting with multiple robots to walking on different surfaces, quickly. The simulation includes a feature that seamlessly transfers the program from the computer to the robot.
The original DARwIn-OP was created as collaboration between Virginia Tech, the University of Pennsylvania, Purdue University and Robotis Co., and measures 17.9 inches tall and weighs 6.2 pounds. The OP part of the robot’s name lets researchers tinker with the robot’s capabilities. As Virginia Tech’s Robotics & Mechanisms Lab explains, “DARwIn-OP is a true open platform where users are encouraged to modify it in both hardware and software, and various software implementations are possible.”
The virtual twin will be available to other researchers working with DARwIn-OP as well as several other new tools, include keyboard interaction and text-to-speech functionality. A video of the robot in action can be viewed below.
© Copyright IBTimes 2026. All rights reserved.
- MOST POPULAR IN Science



















