

Flying Jellyfish-Like Machine Conceptualizes How Tiny Future Surveillance Robots Can Move

Researchers at New York University have taken cues from the aerodynamics of jellyfish to develop a tiny machine that can fly in a way that resembles the movements of the boneless, ocean-dwelling creatures.
The new development, which was presented at the American Physical Society's Division of Fluid Dynamics meeting on Sunday in Pittsburgh, Pa., demonstrated an innovative method of flight that is expected to be implemented on miniaturized future robots for various tasks such as surveillance, search-and-rescue, and monitoring of the atmosphere and traffic.
"Our [robot] is an aerial jellyfish if you will," Leif Ristroph, assistant professor of mathematics at NYU, told NBC News. "No one’s ever built this, and as far as we know nature never built it either to fly in air. Maybe that indicates that it’s a bad idea? In any case we got it to work, so maybe not that bad.”
According to Ristroph, while many attempts have been made to incorporate the flight of insects such as flies into small aerial robots, maintaining stability in such designs has been a challenge.
While in flight and maneuvering, a fly constantly monitors its surroundings to sense the wind or any approaching predator. At the same time, it also adjusts its flying motion to respond quickly, Ristroph noted, adding that it is extremely difficult to recreate such a complex control system and squeeze it into a small mechanical device.
Ristroph said the study continued to look for alternatives and eventually devised a new way of flapping-wing flight -- inspired by the swimming motions of jellyfish -- that does not require any control or feedback system to be stable.
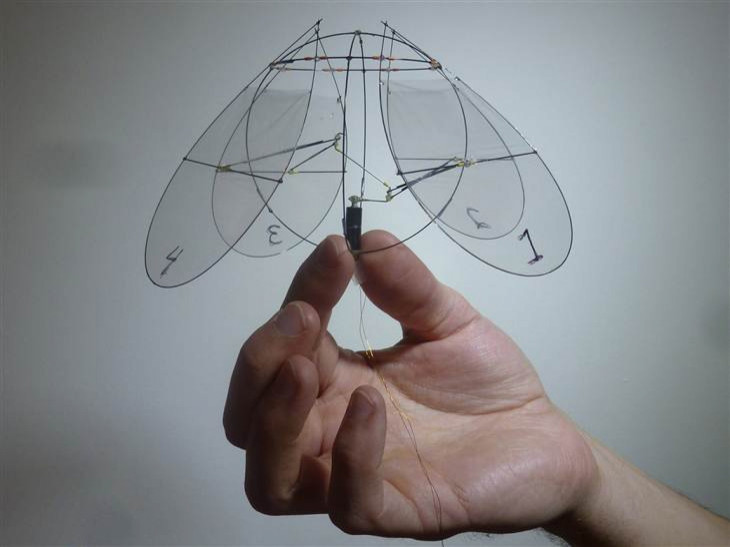
The prototype device, developed by Ristroph, weighs merely two grams and is only eight centimeters wide. The miniature robot flies by flapping four wings that are arranged like petals on a flower. According to the researchers, the up-and-down motion of the device’s wings is like that of a pulsating jellyfish while its ultimate fluttering flight also resembles a moth. The robot can float, rise, and fly in a particular direction.
Ristroph said the prototype is limited by its dependence on an external power source that restricts maneuverability, either autonomously or through remote control, and admitted that the device is still far away from becoming a practical robot, but the new results provide a blueprint for designing more sophisticated and complex robots in future.
According to Ristroph, researchers are aiming to develop much smaller flying robots, allowing them to squeeze into small spaces and fly around unnoticed, adding that a simpler design would serve better to create an ideal device.
© Copyright IBTimes 2026. All rights reserved.
- MOST POPULAR IN Technology

















