

MIT Researchers Develop Robotic Cheetah That Runs And Jumps Like 'Usain Bolt'

Scientists at the Massachusetts Institute of Technology, or MIT, have developed an algorithm to make a robot run and jump like a cheetah, the planet's fastest animal on land.
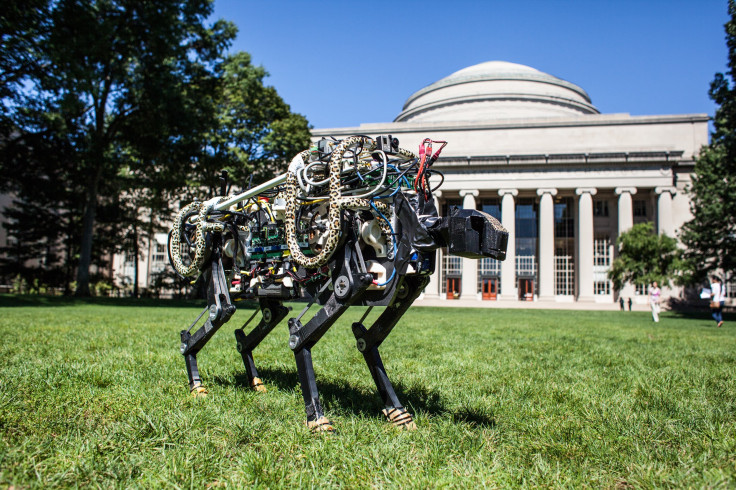
According to the researchers, the robotic cheetah is a sleek, four-legged assemblage of gears, batteries and electric motors, weighing about as much as a real cheetah. The robot was recently tested on MIT’s Killian Court, where it ran and jumped across the grass at a steady clip, while on an indoor track, the robot clocked speeds of up to 10 mph.
“Most robots are sluggish and heavy, and thus they cannot control force in high-speed situations,” Sangbae Kim, an associate professor of mechanical engineering at MIT, said in a statement. “That’s what makes the MIT cheetah so special: You can actually control the force profile for a very short period of time, followed by a hefty impact with the ground, which makes it more stable, agile, and dynamic.”
The algorithm is responsible for programming each of the robot’s legs to apply a certain amount of force in the split second when it touches the ground, to help it maintain a particular speed. According to the researchers, this force-control approach to robotics is similar to the way sprinters race.
“Many sprinters, like Usain Bolt, don’t cycle their legs really fast,” Kim said. “They actually increase their stride length by pushing downward harder and increasing their ground force, so they can fly more while keeping the same frequency.”
While bounding, an animal’s legs touch the ground for a fraction of a second before cycling through the air again. The faster an animal runs, the shorter the cycle. While a cheetah can run as fast as 75 mph, the researchers expect the robotic cheetah to reach speeds of up to 30 mph.
The new algorithm, according to researchers, determines the amount of force a leg should exert in the short interval between successive contacts with the ground. That force is enough for the robot to push up against gravity, while maintaining a forward momentum.
“Our robot can be silent and as efficient as animals,” Kim said. “The only things you hear are the feet hitting the ground. This is kind of a new paradigm where we’re controlling force in a highly dynamic situation. Any legged robot should be able to do this in the future.”
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Science


















