

Researchers Develop Software That Uses Cyborg Roaches To Map Unknown Areas

Swarms of bugs may soon offer first responders an initial layout of unmapped emergency scenes.
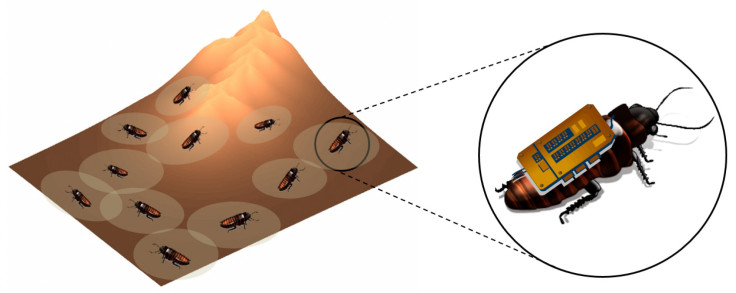
A team of researchers at North Carolina State University details in a press release that cockroaches could be among the lucky bugs to use the new software that they hope will allow the swarms to map out tough to reach spaces like collapsed buildings.
The critters will be fitted with electronic sensors before they're released into the structure or scene that requires mapping. Known as biobots, these insect cyborgs would first be allowed to move about the structure randomly. In order to gauge how far apart the swarm had spread in the building, scientists would relay signals given off by the bugs’ sensors since the bugs can’t be tracked by GPS.
The signals would inform the research team through radio waves if the biobots were close to each other. Dr. Edgar Lobaton -- NC State professor and senior author of the paper on the project -- says the team is designing the technology to use the roaches’ random movements to its advantage.
“One characteristic of biobots is that their movement can be somewhat random,” says Lobaton. “We’re exploiting that random movement to work in our favor.”
When the swarm has adequately spread out, the researchers would then send another signal that would command the bugs to continue moving until they hit a wall or damaged surface. The bugs would then be instructed to move up the wall in an action called “wall following.”
After the bugs complete several cycles of “wall following,” an algorithm in the new software takes the data and uses it to create a rough map of the surrounding area. The team says the software could also be used to offer public safety officials assistance in identifying the location of chemical and radioactive threats.
For now, though, the software has only been used on computer simulations and with robots. The next step in the project will be to test the program with actual biobots.
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology


















